Aide d'i3D Express / Principes fondamentaux
- Manipuler les images
- L'outil Oblique
- L'outil Parallèle
- L'outil Palette 2D
- Exporter la caméra 3D
Approche théorique 2D :
La difficulté majeure dans la mise au point d'i3D Express réside dans la recherche dans une photographie d'éléments de perspective pertinents suffisamment nombreux pour pouvoir appliquer les résultats de son analyse en 3D.
Dès l'origine Filippo Brunelleschi puis Leon Batista Alberti l'avaient compris. Encore aujourd'hui, des personnes comme Scott Robertson[1] - bien qu'elles connaissent et utilisent la 3D -, ont bien saisi que la perspective est conçue comme une représentation géométrique planaire (2D) d'un espace 3D et pas nécessairement comme un espace 3D projeté en 2D. Mathématiquement, il est tout à fait concevable de produire des solutions 2D.
Il s'agit d'un problème d'image captée à un instant donné depuis 1 oeil unique et non d'un espace 3D saisi dans sa globalité.
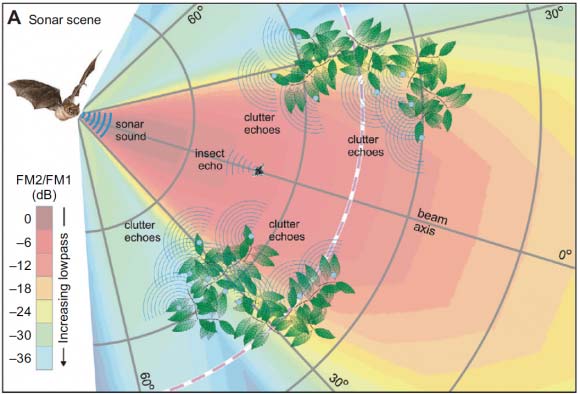
Les approches habituelles proposées par les outils d'aide à l'incrustation 3D laissent supposer - en prenant une métaphore -, que parce qu'une chauve-souris modélise l'espace tridimensionnel à partir de la superposition d'une multitude d'ondes sonores captées par ses oreilles[2], elle devrait avoir une vision 3D conventionnelle car elle a 2 oreilles.
Il n'en est rien.
Certes pour saisir la réalité d'un espace, la méthodologie mathématique la plus courante consiste à élever cet espace à une dimension supérieure.
Dans les faits et pour s'affranchir des limites posées par l'espace euclidien, nous en sommes aujourd'hui à englober l'espace 3D dans une quatrième dimension, souvent appelée espace homogène, pour en saisir toutes les nuances et pouvoir y réaliser des opérations complexes qui produisent, in fine : une image 2D.
Calcul de la Focale relative à une image :
Soit une image et sur cette image 2 lignes visuellement placées sur un même plan et perpendiculaires l'une par rapport à l'autre. On peut placer un point au croisement de ces deux lignes et créer 2 demie-droites suivant ces deux lignes issues de ce point qui s'arrêteront à l'infini (la ligne d'horizon).
1ère conséquence :
Quel que soit le point choisi dans cet espace virtuel, il existera toujours 2 lignes perpendiculaires ayant pour infini les 2 mêmes points que ceux trouvés à l'horizon.
2ème conséquence :
L'observateur pour prendre la photographie est lui-même placé dans cet espace.
1ère conclusion :
Pour la position du photographe, il existe donc aussi 2 droites perpendiculaires issues de sa position et ayant pour limite les 2 points de fuite trouvés à l'infini.
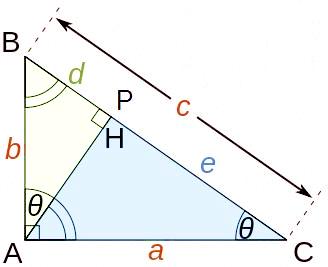
2ème conclusion :
Soit A la position du photographe, B et C les 2 points de fuite, on peut donc construire 1 triangle rectangle dont la hauteur H issue de A et pointant vers BC en P (le centre optique) correspond à la distance entre l'observateur et le cadre qui permet de voir exactement ce qui se trouve dans la photographie.
3ème conclusion :
Cette hauteur H correspond à la distance entre l'observateur et le plan de projection où se projette l'espace vu (le contenu de la photographie). Cette distance est appelée distance focale relative à la photographie notée F.
Calcul :
Calculer F revient donc à calculer la hauteur AH dans le triangle rectangle. Pour cela, on utilise le théorème de DESCARTES : AH2 = BP x PC.
= facile.
Si vous avez tout compris, alors ce qui suit est simple.
S'il est avéré qu'il y a un 3ème point de fuite dont l'axe vertical (perpendiculaire à l'horizon) n'est pas confondu avec l'axe vertical du centre optique, alors P sera placé à l'intersection de l'horizon et de cet axe vertical et la distance focale F devra être recalculée car AH sera forcément différente.
Evaluer la Focale optique :
Selon le bouton choisi, la Focale obtenue peut être calculée : sur une base de 36mm adaptative* (comme sur 3dsmax) par rapport à la diagonale de l'image, à la largeur, la hauteur, la maximale des 2, la diagonale basée sur une optique de 50mm, la maximale entre largeur et hauteur basée sur une optique de 36mm fixe comme sur Artlantis et Maxwell (bouton
Dans 3dsmax ou Blender, l'option par défaut dans les paramètres de focale de la caméra se base sur la largeur de l'image rendue, correspondant ici au bouton
Dans 3dsmax une FOV est alors calculée. L'équivalent sous Blender est appelé "Sensor".
FOV : Field of view ou champs de vision en français.
*Adaptative : signifie que si l'on choisi autre chose qu'un calcul de focale sur la largeur, la base optique de référence sera calculée en fonction d'une largeur optique de 36mm et une hauteur optique calculée en fonction du rapport entre la largeur et la hauteur de l'image.
Traditionnellement, on se sert de la dimension des capteurs (pour 1 apn) ou de la pellicule en argentique. Le format de référence est la pellicule de 24x36.
Cependant, on peut se référencer aussi à d'autres formats. Le choix que l'on fait modifie le rapport entre la longueur de focale utilisé et la diagonale de ce format. D'où tous ces calculs.