Aide d'i3D Express / Outil Oblique
- Manipuler les images
- L'outil Oblique
- L'outil Parallèle
- L'outil Palette 2D
- Exporter la caméra 3D
- Principe général
- Concepts de base
- Recherche expérimentale du 2ème point de fuite
- Recherche expérimentale du 3ème point de fuite
- Recherche expérimentale de la position de la ligne d'horizon
- Méthodes d'utilisation : Approches précises ou rapides
- Liste des commandes commentées
Principe général :
Fer de lance d'i3D Express, l'outil Oblique permet de tout mettre en oeuvre pour restituer très rapidement à partir d'une photographie les informations de focale et de position du photographe dans l'espace réel.
Il doit être utilisé chaque fois que l'axe horizontal de la caméra n'est plus perpendiculaire aux plans verticaux des objets face auxquels elle se trouve.
En constante évolution depuis sa création, de nombreuses fonctionnalités ont été mises en oeuvre ; les unes expérimentales, les autres reprenant certaines des bases de la géométrie descriptive.
L'idée majeur est d'imaginer qu'à partir de données fragmentaires récupérées dans l'image, l'application peut reconstituer assez ou très précisément les conditions réelles de prise de vue.
Rappelons que l'objectif d'i3D Express est double :
- Analyser la géométrie de l'image, trouver les lignes parallèles et perpendiculaires, évaluer les pentes «verticales», l'orientation horizontale des objets par rapport à l'axe du point de vue. L'outil peut aussi être combiné avec la Palette 2D pour dessiner, par exemple, une maquette virtuelle 2D en perspective de l'espace ou mettre en exergue des disparités géométriques dans l'image.
- Calculer les données tridimensionnelles de la caméra afin qu'elles puissent être utilisées dans certains des logiciels d'image de synthèse les plus courants, qu'ils soient payants ou gratuits tels que Autodesk 3DS Max et Maya, Abvent Artlantis, Blender.
Certains scripts comme ceux pour Maya ou Rhinocéros ne sont toujours pas achevés et ne peuvent donc pas être utilisés. Celui de Blender, plus avancé peut l'être mais ne comprend pas pour l'instant les paramètres de redressement de la perspective.
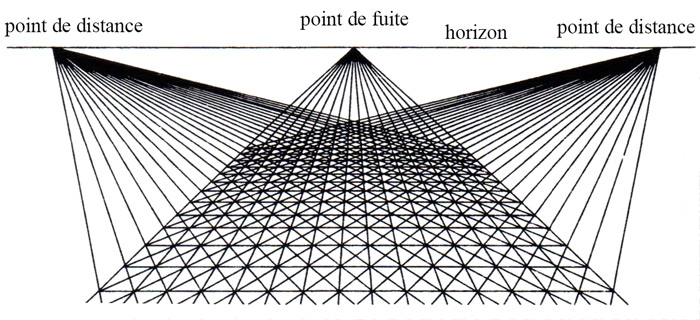
Il est vrai que pour construire une projection perspective sur un support 2D et pouvoir évaluer la focale, seules 3 informations sont strictement nécéssaires : la position de l'horizon et 2 lignes perpendiculaires dans l'espace réel placées sur un plan horizontal parallèle au sol.
La méthode d'Alberti permet de retrouver ces 2 dernières (points de distance - PD) en traçant les diagonales d'une surface carrée. Encore faut-il que ce carré puisse être clairement défini dans l'image.
Mais si l'une de ces informations n'est pas directement présente, est-il possible de la reconstruire à partir des 2 autres ? De nouvelles approches sont quotidiennement ajoutées à l'outil Oblique pour tenter de résoudre cette équation.
Concepts de base :
À l'instar de la méthode d'Alberti qui cherche la distance entre 2 points de distance (PD), i3D Express utilise la distance entre 2 droites perpendiculaires dans la réalité qui se prolongent à l'infini sur la ligne d'horizon dans la photographie pour déterminer la distance Focale relative à l'image.
Cette focale est ensuite convertie en une focale optique. Sa valeur finale peut aussi dépendre des dimensions de l'image ou du rapport entre sa largeur et sa hauteur.
Ce rapport ramené à une valeur de conversion optique, est appelé par certains logiciels : «Aperture Width» ou «Sensor Width and Height». i3D Express a fixé cette valeur à 36 (et 24 en hauteur). Loin d'être arbitraire, elle correspond au format standard utilisé encore aujourd'hui par les appareils photographiques argentiques et numériques.
(...) Dans une prochaine version, des paramètres avancés d'i3D Express permettront de choisir cette valeur en fonction du format natif ou connu de l'image, ainsi que du type de matériel éventuellement utilisé pour la prise de vue.
Comme indiqué plus haut, les deux droites perpendiculaires sont choisies si elles se situent sur un plan parallèle au sol sur lequel se trouve le photographe. On suppose évidemment que ce sol n'est pas en pente et virtuellement parallèle à la mer.
C'est pourquoi, dans une image urbaine, on privilégiera de prendre un alignement de fenêtres sur un bâtiment plutôt que la base de celui-ci.
D'autre part, ces droites ne s'intersectent pas forcément : on doit seulement s'assurer que ramenées à un plan 2D elles soient perpendiculaires.
Enfin pour garantir une précision maximale, c'est-à-dire dépourvue de déformations optiques -«effet coussinet»-, l'utilisateur devra choisir des lignes les plus éloignées possible des bords de l'image et les plus proches des axes gris du centre optique de la photographie.
Pour compléter la restitution de la position et de l'orientation de la caméra, il peut s'avérer nécessaire, dans certaines conditions, de déterminer un troisième point de fuite.
En fait, dès que la ligne d'horizon n'est pas confondue avec la ligne horizontale du centre optique, un 3ème point de fuite existe.
Plus précisément, si l'horizon est au-dessus de cette ligne, le photographe regarde vers le bas.
Il s'agit d'une vue en plongée. Les lignes verticales de l'espace réel se joignent en un point 2D virtuel situé vers le bas.
Dans le cas contraire, il s'agit d'une vue en contre-plongée. Les lignes verticales de l'espace réel se joignent en un point 2D virtuel situé vers le haut.
Certains objectifs d'appareils photographiques permettent de redresser optiquement la perspective de telle sorte que le 3ème point de fuite disparaisse même si la ligne d'horizon n'est pas confondue avec l'horizontale du centre optique.
Les logiciels d'image de synthèse 3D disposent d'outils de redressement de caméra plus ou moins automatisés. C'est le cas de 3DS Max. Pour Blender par contre, l'utilisateur doit modifier un paramètre nommé «Shift Y de la caméra» et orienter celle-ci en alignant verticalement la cible et l'origine de la caméra.
Dans i3D Express, tant que l'utilisateur ne définit pas de 3ème point de fuite, le logiciel considère que l'utilisateur utilisera un redressement de point de vue dans le logiciel d'image de synthèse cible.
Soulignons que l'évaluation ou non de ce point ne modifie en rien la valeur de la distance focale. Par contre, il contribue à évaluer l'orientation de la caméra au moment de la prise de vue et permet en l'absence de certaines données de calculer la focale.
Un bouton de calcul de Roulis ![]() a été ajouté.
a été ajouté.
Ce dernier utilise le positionnement simultané des 2 lignes de fuites ainsi que des segments (rouge vers le point de fuite de droite et bleu vers celui de gauche) pour calculer la pente de l'horizon.
Parallèlement, il tente de repositionner tous les éléments, une fois le basculement de l'image effectué : ligne d'horizon, segments et points de fuites.
C'est une nouvelle alternative pour calculer tous les éléments de la perspective en un minimum d'opérations.
Recherche expérimentale du 2ème point de fuite :
Question : Comment fait le dessinateur pour construire intuitivement une perspective complexe à plusieurs points de fuite en ne traçant initialement qu'une ligne d'horizon et une ligne de fuite ?
Il semble qu'intuitivement, il établisse un rapport entre les lignes tracées, les points posés et la limite de la surface de la feuille sur laquelle il dessine.
Il est évident, qu'au prime abord, il m'est impossible d'évaluer l'orientation d'une perpendiculaire à une droite sans posséder d'informations 3D supplémentaires : ligne d'horizon et ligne de fuite unique sont insuffisantes.
Peut-on supposer alors que le rapport au format du support suffise à effectuer cette évaluation ?
C'est sur cette intuition que repose la création de l'outil de recherche automatique du 2ème point de fuite.
L'outil tente d'établir ce lien entre position d'un point de fuite unique et format d'image. Même s'il ne trouve pas toujours une solution idéale, celle-ci semble sensée dans bien des cas. Dans sa version actuelle cependant, cette méthode oblige l'utilisateur à définir 1 point de fuite sur la ligne d'horizon à l'intérieur de la surface de l'image.
Recherche expérimentale du 3ème point de fuite :
Aussitôt la ligne d'horizon placée et une première distance focale calculée, l'outil s'affiche. Une fois activé, il calcule la position du 3ème point de fuite en tenant compte de l'orientation du photographe par rapport à l'horizon et au centre optique de l'image.
En fait l'outil prend comme base la distance focale relative et la distance entre l'axe horizontal du centre optique et la ligne d'horizon. Puis il applique le théorème de Descartes pour calculer la position du point de fuite : le segment de longueur «PC».
Recherche expérimentale de la position de la ligne d'horizon :
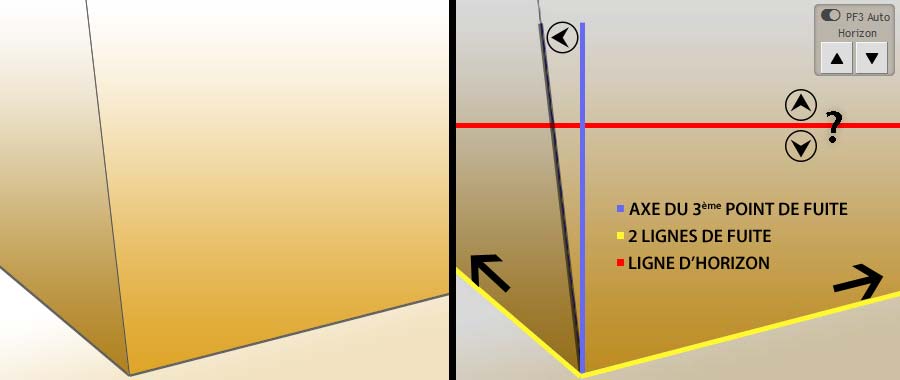
Le cas de figure présenté ci-dessus démontre que les méthodes habituelles de recherche de points de fuite d'i3D Express ne sont pas applicables ici.
En effet l'utilisateur ne dispose d'aucun couple de lignes parallèles dans l'espace réel pour évaluer la position d'au moins l'un des points de fuite et de la ligne d'horizon.
Un rapide coup d'oeil de l'image nous indique que sans aucun doute la ligne d'horizon doit se trouver à l'extérieur de l'image -la ligne verticale suggère un point de vue en plongée-.
Or, sans calcul d'intersection de droite, l'utilisateur ne peut pas à priori déplacer manuellement cette ligne hors de l'écran.
Toujours dans l'optique de reconstruire les données à priori inexistantes, cet outil est une extension de la recherche automatique du 3ème point de fuite.
Après avoir déplacé arbitrairement la ligne d'horizon au-dessus ou en-dessous de l'axe central du centre optique
- il est capital que la ligne d'horizon ne se trouve pas sur cet axe pour pouvoir activer la recherche assistée du 3ème point de fuite -,
placer manuellement les 2 lignes de fuite (jaunes), lancer un premier calcul de recherche de focale pour afficher l'outil et pouvoir l'activer.
Ce préambule est nécessaire pour indiquer clairement à l'application que nos choix de position des lignes de fuite sont enterrinés.
Dès lors, 2 boutons permettent de modifier la position de la ligne d'horizon. De plus, i3D Express va verrouiller l'orientation des lignes de fuite de sorte que le logiciel va calculer progressivement la position de la ligne d'horizon tout en évaluant également l'orientation de la bascule de l'axe bleu du troisième point de fuite.
Toujours en développement, cette fonctionnalité devrait à terme permettre d'évaluer si pour la présence de telles conditions de prise de vue, l'image n'aurait pas été recadrée. Il calculera alors la position probable du véritable centre optique et permettra le calcul précis de la focale. Des premiers tests effectués démontrent la faisabilité du procédé.
Méthodes d'utilisation : Approches précises ou rapides
Approche précise :
- Tracer les «Segments 1 et 2» en suivant 2 lignes de l'image qui à priori sont parallèles dans la réalité et placer la ligne d'horizon en appuyant successivement sur les boutons
 puis
puis  .
. - Placer le 1er point de Fuite en appuyant sur le bouton
 .
.
- Pour créer le 2ème point de fuite, ne tracer que le «Segment 1» en suivant une ligne, qui dans la réalité est perpendiculaire à la première ligne de fuite et se trouve également sur un plan parallèle au sol horizontal. Puis placer le 2ème point de Fuite en appuyant sur le bouton .
- Cliquer sur le bouton Calculer sous l'intitulé Caméra selon le type de focale.
- Si l'image présente des lignes verticales convergentes vers le bas ou le haut, c'est qu'il y a un troisième point de fuite.
Tracer les «Segments 1 et 2» en suivant 2 de ces lignes qui à priori sont parallèles dans la réalité puis appuyer sur le bouton .
.
L'axe Bleu s'oriente en conséquence vers ce point. Une ligne verticale blanche peut aussi apparaître si la position horizontale de ce point de fuite ne coïncide pas avec l'axe vertical du centre optique.
Si vous déplacez l'axe Bleu, celui-ci se ré-oriente automatiquement vers le 3ème point de fuite.
- Cliquer sur le bouton Calculer sous l'intitulé Caméra selon le type de focale pour mettre à jour les données d'orientation de la caméra.
Approche alternative :
- Tracer les «Segments 1 et 2» en suivant 2 lignes de l'image qui à priori sont parallèles dans la réalité et appuyer sur le bouton .
Si l'intersection se situe à l'intérieur de la surface de l'image, vous pouvez essayer de déterminer quasi-automatiquement toutes les données de perspective :- Activer «la Baguette Magique» PFuite et appuyer sur le bouton «Cible» .
- Cliquer sur le bouton Calculer sous l'intitulé Caméra selon le type de focale.
- Si la ligne d'horizon ne coïncide pas avec le centre optique, on peut calculer un 3ème point de fuite. Activer l'outil PF3 Auto pour lancer son calcul immédiat. Pour des ajustements, voir le paragraphe précédent.
- Cliquer sur le bouton Calculer sous l'intitulé Caméra selon le type de focale pour mettre à jour les données d'orientation de la caméra.
Approche manuelle :
-
Utiliser la barre d'interaction en bas de la palette afin de placer, toujours dans cet ordre :
la ligne d'horizon puis les lignes de fuite.
Pour manipuler les lignes de fuites avec une meilleure précision, utiliser les boutons de l'outil «Ajuster les Points de fuite».
- Cliquer sur le bouton Calculer pour évaluer la Focale.
- Pour un 3ème point de fuite éventuel, utiliser les boutons de l'outil «Ajuster le 3ème point de fuite».
- Cliquer sur le bouton Calculer pour mettre à jour les données d'orientation de la caméra.
Liste des commandes commentées :
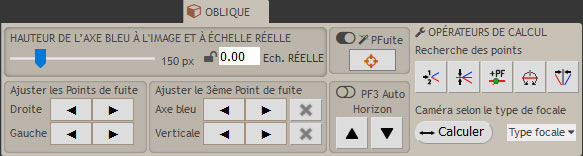
Opérateurs de calcul
Recherche des points :Bouton Détails Calcule l'intersection des segments 1 (rouge) et 2 (bleu) définis par l'utilisateur. S'il trouve une intersection, il prolonge ces segments jusqu'à ce point quelque soit la manière dont les segments ont été tracés.
Essentiellement utilisés pour la recherche de point de fuite, il est également utilisé pour vérifier des alignements dans l'image, par exemple.Cet outil nécessite l'utilisation préalable du précédent. Il place la ligne d'horizon à l'intersection des segments 1 et 2. Placer 1 point de fuite au croisement du segment 1 (rouge) et de l'horizon. 
Utiliser les lignes de fuite, le segment 1 vers la droite et le segment 2 vers la gauche pour déterminer la pente de l'horizon (le roulis de la caméra). Placer le 3ème point de fuite au croisement des segments 1 (rouge) et 2 (bleu) convergeants verticalement uniquement.
Si le point ne coïncide pas avec l'axe vertical du centre optique c'est qu'il y a un roulis de la caméra. I3DEspress calcule automatiquement la rotation de l'image.
Avec le raccourci «Ctrl», l'outil crée également un segment vertical blanc si la convergence verticale des 2 segments ne correspond pas avec la ligne verticale grise du centre optique : fonction utile si l'on soupçonne que l'image ait été recadrée.